久々の投稿です。
 |
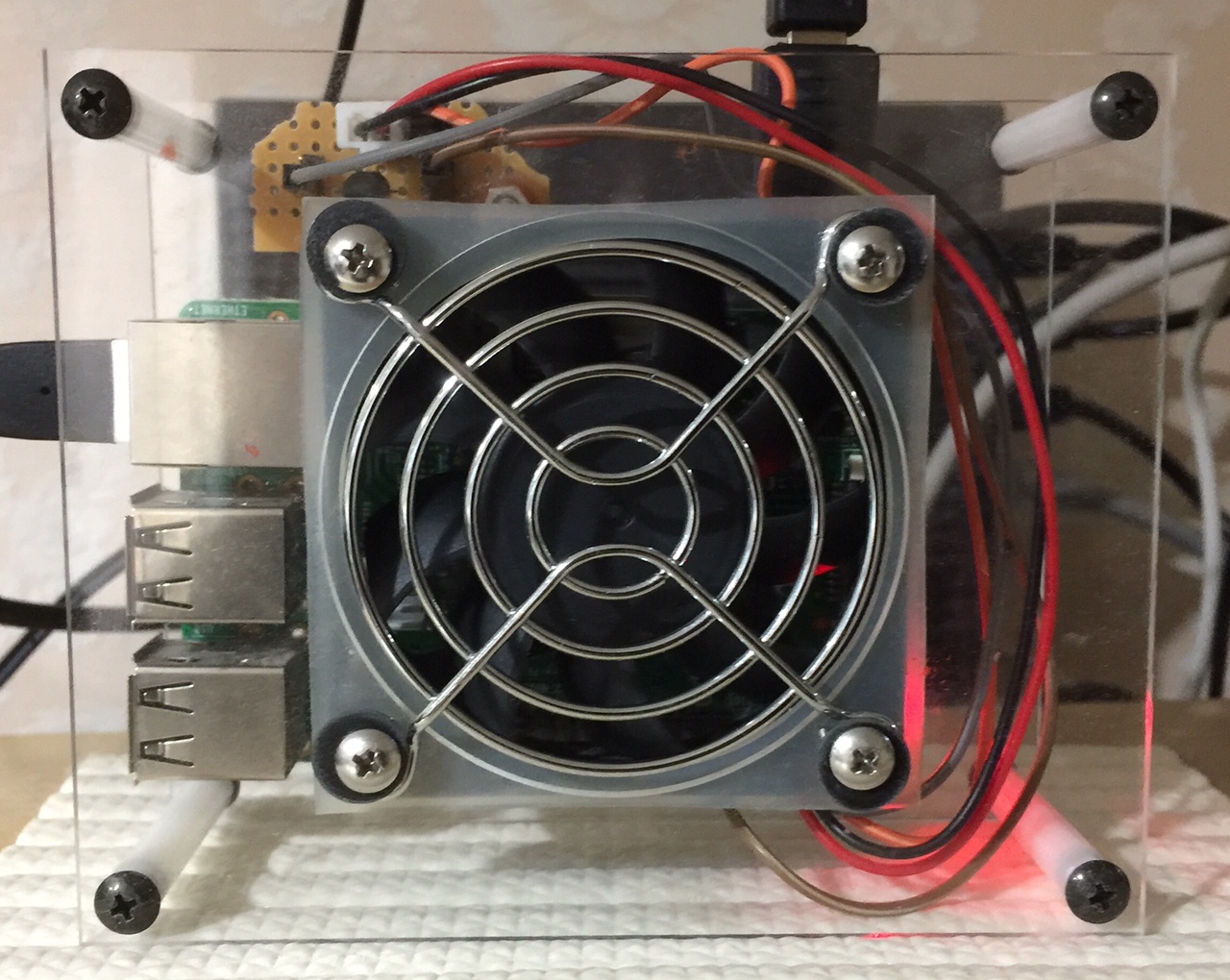
Raspberry Piリチウム電池の拡張ボードを購入しました。
Amazonで2497円でした。
RaspberryPiに導入した時の覚書です。
※RaspberryPiへの電源接続は簡単なので省略、UART接続したときの覚書です。
参考サイト
① RPi UPSPack V3 Product User Guide
② Raspberry Pi GPIOを使用したシリアル通信
1. UPSのRX、TX端子をRaspberry Pi のGPIO15(UART RX)、GPIO14(UART TX)へ接続 ※参考サイト①の通り。端子のはんだ付けが必要。
2. Raspberry Pi のシリアル通信を有効化
- Linuxシリアルコンソールを無効化する
– UART0をPrimary UART に設定する( /boot/config.txt に dtoverlay=disable-bt を追加)
※参考サイト②「GPIOヘッダーのUARTピンでUART0を使用する方法」
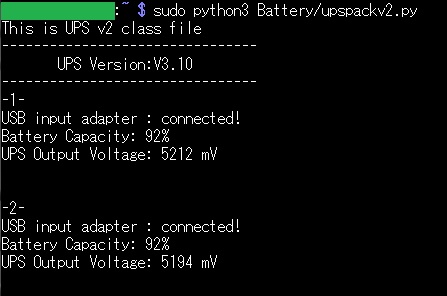
3. 再起動後、以下のスクリプトを実行
upspackv2.py
上位互換性があるみたいで、V2向けのものでも動く模様
※嵌った点
UART通信がたまにうまくできず、UPSからのデータが文字化けするときがある。その時はUPSの電源をOFF→ONすると復帰する。
これを使ってソーラー発電による無電源化ができないか挑戦中です。
できたらYoutubeに上げようかと思っています。